
En la actualidad, el avance en robótica es imparable. Los beneficios de estas tecnologías han permitido la automatización de procesos y el aumento de la eficiencia y la productividad en diferentes áreas y campos de acción. Lo anterior ha hecho que la robótica se convierta en uno de los ejes fundamentales de los entornos colaborativos propios de las industrias, permitiéndoles la adaptación a los nuevos retos y exigencias de la industria 4.0. En este artículo de Futuro Eléctrico te hablaremos sobre los principales tipos de robots industriales y sus funcionalidades.
Tabla de contenidos
¿Qué son los robots industriales?

Antes de revisar los tipos de robots industriales, se hace necesario partir de un pequeño resumen sobre qué son y cuáles son sus características clave.
En primer lugar, vale resaltar que la robótica industrial involucra a aquellos sistemas mecánicos que se ejecutan sin manipulación humana. Los robots industriales son, entonces, máquinas automáticas programables. Ellas son las encargadas de sustituir al ser humano en ciertas tareas propias de la industria, como aquellas pesadas, repetitivas y peligrosas.
La morfología básica de estos robots se conforma por la estructura mecánica de diferentes tipos de brazos robóticos industriales, la cual tiene mucha similitud a la anatomía del brazo humano, incluyendo las funciones que cumple. Estos brazos son programables y mecánicos.
Ahora bien, otra parte clave de los robots industriales son las articulaciones —las cuales determinan en gran medida la clasificación de estos robots—. Los tipos de articulaciones en robots industriales son aquellos eslabones que permiten el movimiento relativo del brazo y se determinan por el grado de libertad que le brindan. Estas pueden ser lineales o rotacionales y se clasifican así:
- Rotacional. Permite la rotación alrededor del eje de la articulación. Tiene un grado de libertad.
- Cilíndrica. Brinda dos grados de libertad: Rotación y traslación.
- Prismática. Un grado de libertad relacionado con la traslación a lo largo del eje de la articulación.
- Esférica o rótula. Permite realizar tres giros en tres direcciones perpendiculares.
- Planar. Tiene dos grados de libertad que permiten el desplazamiento en un plano.
- Tornillo. Un grado de libertad que favorece la traslación a lo largo de un eje en forma de rosca.
Ya con lo anterior en mente, es momento de conocer los principales tipos de robots industriales.
Tipos de robots industriales y sus aplicaciones
De acuerdo con la configuración del brazo y con la o las articulaciones que lo conformen, vale mencionar entre los principales tipos de robots industriales a los siguientes:
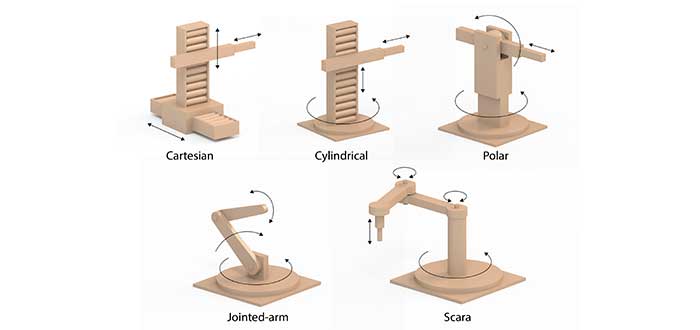
1. Robot cartesiano
Este primero de los tipos de robots industriales se compone de tres articulaciones prismáticas, lo que hace que su movimiento sea completamente lineal. Estos dispositivos funcionan a través de un sistema de coordenadas cartesianas tridimensionales, el cuál consta de tres ejes: X, Y y Z, formando así ángulos rectos en su movimiento.
Los robots cartesianos se caracterizan por ser muy rápidos, precisos, de fácil control y con una elevada capacidad de carga. Esto hace que sean fundamentales para funciones vinculadas a la distribución, almacenamiento, paletizado, carga y descarga de mercancía. Además, debido a su alta precisión, son una gran herramienta para soldar.
Ejemplos de robots industriales de este tipo son las máquinas de pórtico, utilizadas para recoger grandes cargas.
2. Robot SCARA
En inglés, la sigla hace referencia a Selective Compliant Assembly Robot Arm. Este es un robot industrial que cuenta con un brazo flexible con 4 libertades de movimiento: X,Y, Z (esta última es el eje rotativo). La posibilidad de rotación del eje Z lo diferencia del sistema de coordenadas cartesianas.
Estas herramientas son reconocidas, principalmente, por su gran capacidad de carga, la rapidez de sus movimientos y su elevada repetitividad y precisión. Generalmente, son utilizados en operaciones de ensamblaje, montaje y paletización. Por lo anterior, hacen parte de industrias como automoción, alimentaria, aeroespacial y farmacéutico.
3. Robot Delta
Los robots Delta son otros de los principales tipos de robots industriales. Estos son robots paralelos cuyo cuerpo base integra las articulaciones principales, servomotores, reductores y electrónica. Al cuerpo base se unen los brazos mecánicos, los cuales funcionan como bielas, actuando de forma paralela. El extremo de los brazos tiene el efector final y unas pinzas que realizan la tarea de recolección.
Estos robots pueden disponer de hasta cinco grados de libertad y ejecutar hasta 300 movimientos por minuto. También conocidos como robots araña o paralelos, son máquinas diseñadas para aplicaciones de baja carga útil, las cuales se vinculan a actividades de ensamblaje, pick and place y encajado de piezas, en industrias como la electrónica, la alimentaria y la farmacéutica.
4. Robot cilíndrico
Continuamos nuestra lista de tipos de robots industriales con el robot cilíndrico. Estos son robots que cuentan con articulaciones de revolución y articulaciones prismáticas. Esto le permite la rotación de los eslabones del brazo en torno a los ejes del robot, lo que facilita obtener, como su nombre lo indica, el movimiento cilíndrico.
Generalmente se utilizan en operaciones de recogida y colocación en las que los productos se ubican en un mismo lugar. Son muy útiles en la industria alimentaria.
5. Robot esférico
En estos tipos de robots industriales la configuración del brazo se conecta a una junta de torsión y a dos articulaciones giratorias y una lineal. Los ejes de los robots esféricos forman un sistema de coordenadas polares tridimensionales —r, θ y φ—, las que les permiten tener un alcance esférico.
El robot esférico tiene un mayor rango de movimiento y alcance que el de otros robots, permitiendo, incluso, que este se amplíe si se conecta un segundo eslabón a la articulación prismática. Es muy utilizado para la carga de máquinas.
6. Robot antropomórfico
Ahora bien, los robots antropomórficos o articulados son unos de los más utilizados en los procesos de fabricación, ya que simulan el funcionamiento del brazo humano. Estos se conforman por un brazo robótico en el que las articulaciones giran sobre sí mismas, lo cual le permite tener hasta 6 grados de libertad.
Son robots que alcanzan altos niveles de precisión, por lo que comúnmente se implementan en la industria automovilística, en tareas como la soldadura y la pintura en aerosol.
7. Robot colaborativo
Los cobots son robots con características muy cercanas a las de los robots antropomórficos, aunque con dimensiones y peso mucho menores. Son robots manejables, de fácil programación y bastante flexibles, aunque su capacidad y velocidad son menores a la de los demás tipos de robots industriales.
En la actualidad, son de gran utilidad para operaciones de Pick and Place, la toma de muestras en laboratorios y la realización de tareas repetitivas en otras industrias.
¿Cómo elegir el robot industrial correcto?
Debido a la alta importancia de los tipos de robots industriales en la actualidad, es fundamental que conozcas los parámetros clave para elegirlos. La parte más importante para evaluar es su aplicación, es decir, identificar qué procesos realizará el robot en la industria. Por ejemplo, si se busca suplir un proceso semiautomático mixto lo ideal sería un robot colaborativo de fácil manipulación; en cambio, si lo que se quiere es una aplicación pick and place de objetos pequeños, la mejor opción serán los robots Delta.
En segundo lugar, deberás considerar la carga útil (cuál es la carga máxima que un robot puede soportar), ya que esto determinará si puede o no soportar el trabajo que se le quiere asignar. De la mano con la carga, no debes olvidarte del número de grados de libertad con los que cuenta, así como su rango de operación máximo, el grado de repetitividad y su velocidad.
Por último, no dejes de analizar y evaluar los niveles de seguridad con los que el robot funciona. Recuerda que de ellos dependerá su eficiencia, la protección de tu equipo de trabajo y, claro, de la mercancía.
Palabras finales
No hay duda alguna de que el futuro de las empresas, de las fábricas y de muchos otros negocios dependerá, en gran medida, del grado de inteligencia de su industria, y para aumentarlo las implementación de los tipos de robots industriales es fundamental. Así, estaremos un poco más cerca de lograr la inactividad 0 y la máxima eficiencia.
Y tú, ¿conocías sobre los tipos de robots industriales? ¿cuáles crees que son sus principales ventajas? ¡Estamos ansiosos por leerte!